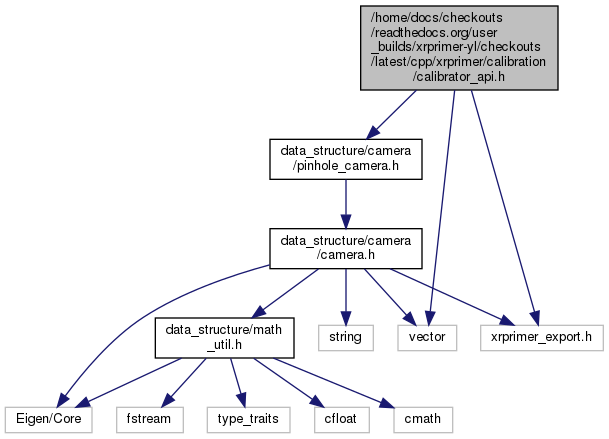
#include <data_structure/camera/pinhole_camera.h>
#include <vector>
#include <xrprimer_export.h>
Go to the source code of this file.
◆ CalibrateMultiPinholeCamera()
| XRPRIMER_EXPORT void CalibrateMultiPinholeCamera |
( |
const std::string & |
calib_config_json, |
|
|
const std::vector< std::vector< std::string >> & |
img_groups, |
|
|
std::vector< PinholeCameraParameter > & |
pinhole_params |
|
) |
| |
Interface to calibrate multiple pinhole camera.
- Parameters
-
| calib_config_json | Config in json format for calibration |
| img_groups | A vector contains multiple frames, where each frame is a vector containing images captured from multiple cameras |
| pinhole_params | A vector of PinholeCameraParamter |


 1.8.13
1.8.13